
Did not think of days to get a robot, what do you think of this
http://walkprod.blogspot.com/2014/05/did-not-think-of-days-to-get-robot-what-do-you-think-of-this.html

The programmable humanoid NAO Next Gen Robot is fully autonomous and is available for education, research, companies and hobbyist developers. The programmable humanoid NAO Next Gen Robot is an open platform for programming and has the ability to learn and can catch attention with his improved skills for entertainment.

Content of the Programmable Humanoid NAO Next Gen Robot - Essential bundle:
- 1 Programmable Humanoid NAO Next Gen Robot
- 1 Software Suite License (including Choregraphe, Webots for NAO, Monitor and SDK)
- 1 exclusive "NAO plays football" behaviour
- 1 year warranty
- 1 year Apps Validation Service Subscription
The programmable humanoid NAO Next Gen Robot is available in two colours: orange & light blue.
Want to find out more about HumaRobotics « NAO plays football » application? Here’s a video with NAO presenting it himself!
Key features of the Programmable Humanoid NAO Next Gen Robot:
NAOqi - the programmable humanoid NAO robot Next Gen middleware
The building blocks of robotics applications include state-of-the-art, complex technologies, such as speech recognition, object recognition, and object mapping. Applications must be secure and able to run in constrained environments that have limited resources.
NAOqi, the embedded programmable humanoid NAO robot Next Gen software, includes a fast, secure and reliable, cross-platform, distributed robotics framework that provides a solid foundation on which developers can leverage and improve programmable humanoid NAO robot Next Gen's functionality.
A technical datasheet with detailed information about the software development kit NAOqi is available in a PDF format.
Motion of the programmable humanoid robot NAO Next Gen
Omnidirectional walking
The programmable humanoid robot NAO Next Gen's walking uses a simple dynamic model (linear inverse pendulum) and quadratic programming. It is stabilized using feedback from joint sensors. This makes walking robust and resistant to small disturbances, and torso oscillations in the frontal and lateral planes are absorbed. The programmable humanoid robot NAO Next Gen can walk on a variety of floor surfaces, such as tiled, and wooden floors. The programmable humanoid robot NAO Next Gen can transition between these surfaces while walking.
Whole body motion
The programmable humanoid robot NAO Next Gen's motion module is based on generalized inverse kinematics, which handles Cartesian coordinates, joint control, balance, redundancy, and task priority. This means that when asking the programmable humanoid robot NAO Next Gen to extend its arm, it bends over because its arms and leg joints are taken into account. The programmable humanoid robot NAO Next Gen will stop its movement to maintain balance.
Fall Manager
The Fall Manager protects the programmable humanoid robot NAO Next Gen when it falls. Its main function is to detect when the programmable humanoid robot NAO Next Gen's center of mass (CoM) shifts outside the support polygon. The support polygon is determined by the position of the foot or feet in contact with the ground. When a fall is detected, all motion tasks are killed and, depending on the direction, the programmable humanoid robot NAO Next Gen's arms assume protective positioning, the CoM is lowered, and robot stiffness is reduced to zero.
Vision
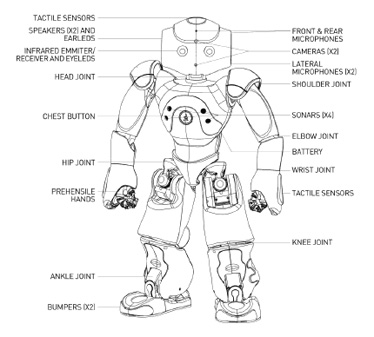
The programmable humanoid robot NAO Next Gen has two cameras and can track, learn, and recognize images and faces.
The programmable humanoid robot NAO Next Gen sees using two 920p cameras, which can capture up to 30 images per second. The first camera, located on programmable humanoid robot NAO Next Gen’s forehead, scans the horizon, while the second located at mouth level scans the immediate surroundings. The software lets you recover photos and video streams of what NAO sees. But eyes are only useful if you can interpret what you see. That’s why programmable humanoid robot NAO Next Gen contains a set of algorithms for detecting and recognizing faces and shapes. Programmable humanoid robot NAO Next Gen can recognize who is talking to it or find a ball or, eventually, more complex objects. These algorithms have been specially developed, with constant attention to using a minimum of processor resources.
Audio
Programmable humanoid NAO Next Gen robot uses four microphones to track sounds, and its voice recognition and text-to-speech capabilities allow it to communicate in 19 languages.
Sound Source Localization
One of the main purposes of humanoid robots is to interact with people. Sound localization allows a robot to identify the direction of sounds. To produce robust and useful outputs while meeting CPU and memory requirements, programmable humanoid NAO Next Gen robot sound source localization is based on an approach known as “Time Difference of Arrival.” This feature is available as a NAOqi module called ALAudioSourceLocalization; it provides a C++ and Python API that allows precise interactions with a Python script or NAOqi module.
The following document gives more information about sound source localisation feature for the programmable humanoid NAO Next Gen robot.
Audio Signal Processing
Using programmable humanoid NAO Next Gen robot’s audio capabilities, a wide range of experiments and research can take place in the fields of communications and human-robot interaction. For example, users can employ programmable humanoid NAO Next Gen as a communication device, interacting with programmable humanoid NAO Next Gen (talk and hear) as if it were a human being. Signal processing is of course an interesting example. Thanks to the audio module, you can get the raw audio data from the microphones in real time and process it with your own code.
Tactile sensors of the programmable humanoid NAO Next Gen robot
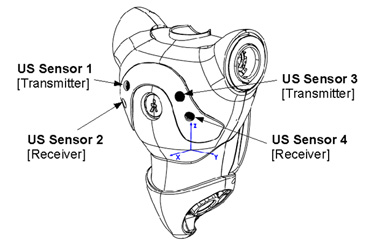
Besides cameras and microphones, programmable humanoid NAO Next Gen robot is fitted with capacitive sensors positioned on top of its head in three sections and on its hands. You can therefore give programmable humanoid NAO Next Gen robot information through touch: pressing once to tell it shut down, for example, or using the sensors as a series of buttons to trigger an associated action. The system comes with LED lights that indicate the type of contact. You can also program complex sequences. Programmable humanoid NAO Next Gen robot is equipped with two sonar channels: two transmitters and two receivers. They allow programmable humanoid NAO Next Gen robot to estimate the distances to obstacles in its environment.
Programmable humanoid NAO Next Gen robot Connectivity
Ethernet, WiFi and infrared
The programmable humanoid NAO Next Gen robot currently supports Wi-Fi (b/g) and Ethernet. In addition, infrared transceivers in the eyes allow connection to objects in the environment. Programmable humanoid NAO Next Gen robot is compatible with the IEE 802.11g Wi-Fi standard and can be used on both WPA and WEP networks, making it possible to connect to most home and office networks. Using XMPP technology (like in the Google Chat system), you can control programmable humanoid NAO Next Gen robot remotely and stream video from its cameras. Using infrared, NAO can communicate with other NAOs and other devices that support infrared.
Programmable humanoid NAO Next Gen robot specifications:
Dimensions: 573 x 275 x 311 mm (22.5 x 10.8 x 12.2 inch)
Weight: 5.2 Kg (11.4-lb)
Autonomy: 60 minutes in active use and 90 minutes in normal use
Degrees of Freedom: 25
Processor: Intel Atom with 1.6GHz
Built-in OS: Linux
Compatible OS:Windows, Mac OS, Linux
Programming languages:
Embedded : C++, Python
Remote: Java, MATLAB, Urbi, C, .Net
Vision: Two HD 1280×960 cameras
Connectivity: Ethernet, Wi-Fi
Programmable humanoid NAO Next Gen robot Software Suite
Entirely designed and developed by Aldebaran Robotics, Choregraphe is the programming software that lets NAO users create, edit movements and interactive behaviors simply.
The intuitive graphic interface, standard behavior library, and advanced programming functions meet the needs of novices and experts.
Beginners can use Choregraphe, a user-friendly behavior editor. An easy drag-and-drop method allows users to simply pick-up boxes of pre-programmed behaviors and to create complete sequences of behaviors. They can also program their own behavior in Python language, and then save it into the library. Webots for NAO simulator is interfaced with Choregraphe to let users test NAO Next Gen behavior in a virtual environment. Users can modify the environment, insert and edit objects and simulate NAO's behaviors before sending command to the real robot. Advanced users can program NAO in C++ or .Net languages and directly access to NAOqi (NAO framework) APIs. The APIs give the user low level access to NAO’s sensors and actuators. Users can also program NAO with other software including: Java, MATLAB and Urbi.
A trial version of Choregraphe is available for download on Aldebaran Robotics' community site (registration needed).

The following video gives an overview of programming with Choregraphe:
.jpg)
















Post a Comment